This is an old revision of the document!
Wind Sensor Team Meeting-April 28, 2017
Attended: Mengyuan, Creighton, Scott
Acoustic Wind Sensor
- Updates:
- To Do:
Ultrasonic Wind Sensor
- Updates:
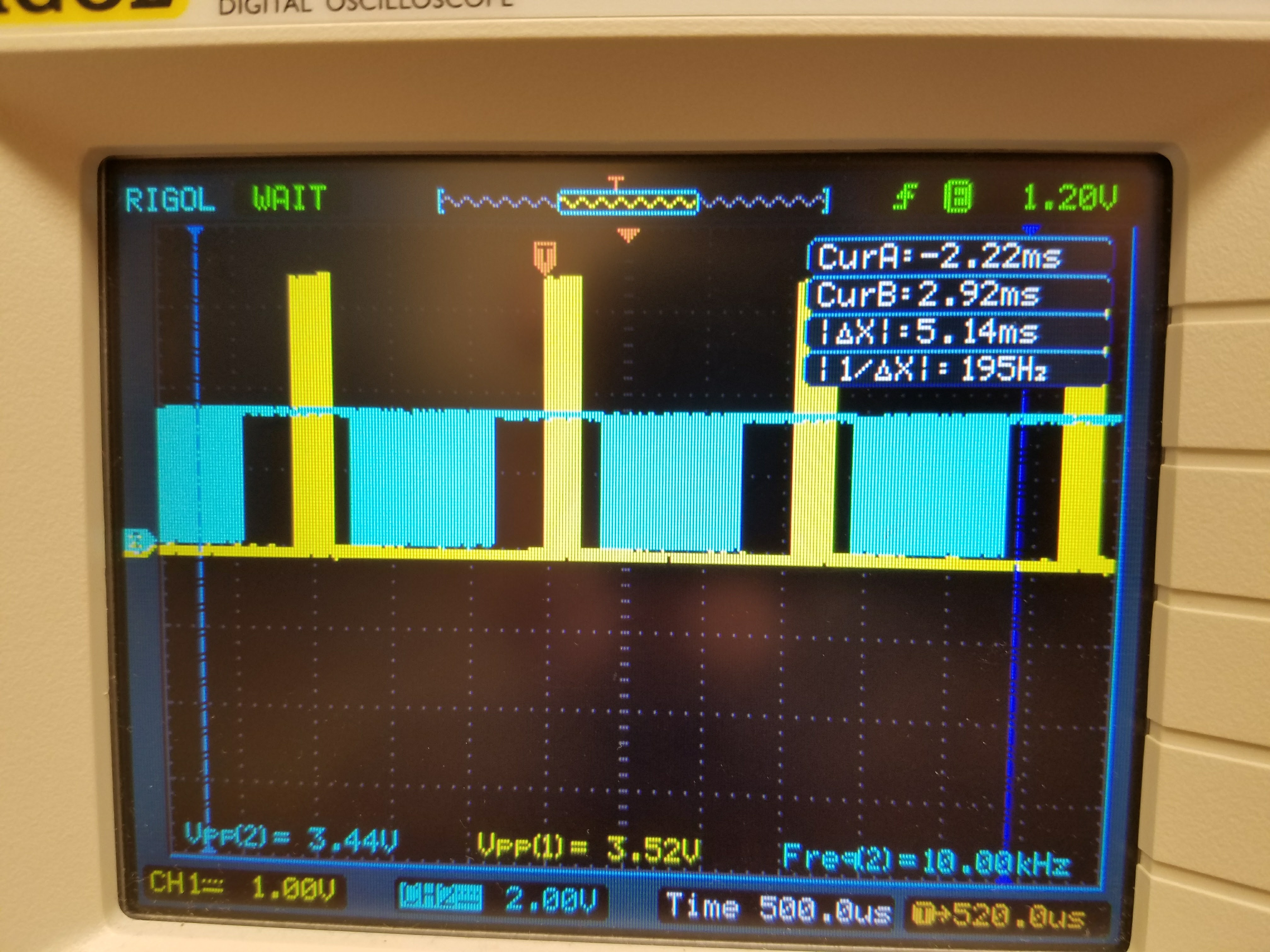
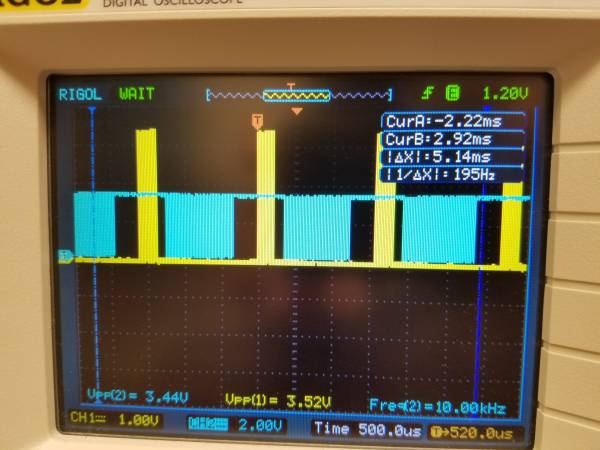
- To try and fix the problem we were having last week (zero-crossing detector not transitioning), we added a DC offset to our receiver output as well as the zero-crossing detector. This DC offset put the received signal within the operating voltages of the LM339 comparator chip we were using. This prompted our circuit to start working again and we can see the results below (the yellow is the emitter and the blue is the output of the ZCD, letting us know when the receiver heard the pulses.
- After that was fixed, we redid our perfboard to a more “permanent” setup (we just stripped wires and made everything flat). Of course we tested it to make sure it was still working, which it was.
- We recently found the option to overclock the Teensy to 120MHz, so now our Teensy runs at 120MHz. It was good that the code didn't have to change much.
- Finished the program to measure propagation time. Essentially it worked as follows:
- We send 10 pulses and record 10 response times. We calculate the difference by taking the difference between the first response and the first emit time (we chose not to average all 10 times because they were somewhat inconsistent–though we should revisit this later on). We then wait approx. 1.5us for the “ringing” to die down.
- We do this 500 times and average all the differences. This produces our propagation time.
- When testing our program with our setup, our results were pretty consistent (difference += 0.4us). We decided to start taking data points and testing with the anemometer.
- To Do: